

До недавнего дня учёным удавалось запрограммировать на совместную работу не более пары сотен роботов. Некоторые исследовательские группы демонстрировали простых роботов в самоорганизующейся роевой сети. Теоретически, она способна содержать тысячи и миллионы роботов, но такое количество механизмов не было изготовлено в реальности.
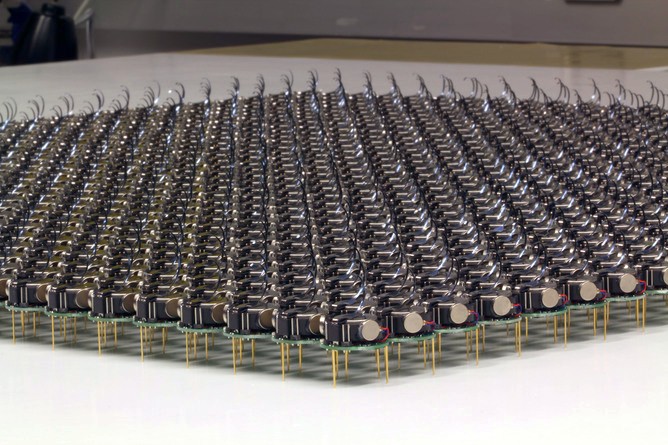
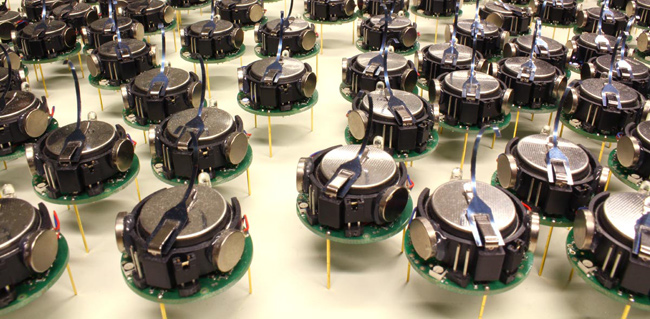
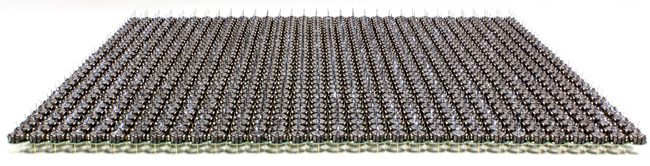
Поэтому последнее достижение научно-исследовательской группы Self-Organizing Systems из Гарвардского университета можно считать новым рекордом. Они изготовили и заставили совместно работать 1024 робота — это крупнейшая из известных систем искусственного роевого интеллекта.
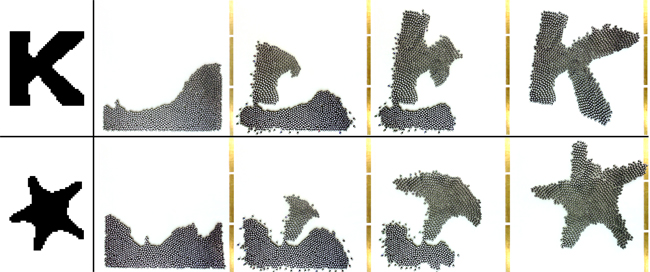
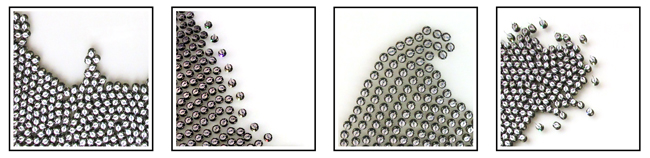
Флэш-моб роботов выглядит примерно так: «Сформировать морскую звезду», — инженер отправляет команду по инфракрасной связи, которая одновременно поступает всем участникам. Те начинают двигаться, моргая друг на друга. «Теперь букву К», — передаёт другую команду человек.
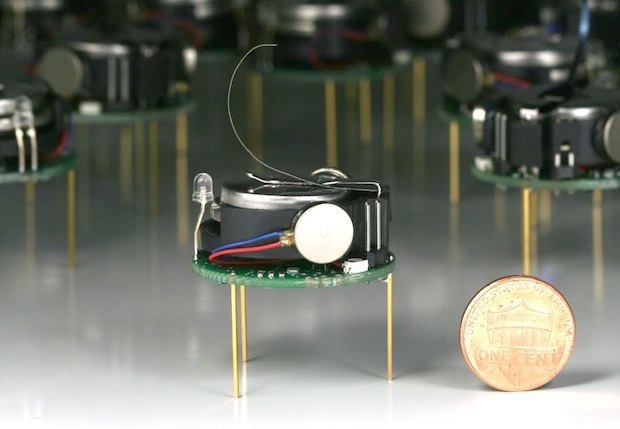
«К» означает Kilobots — название этих исключительно простых роботов размером несколько сантиметров на смешных ножках.
Это экспериментальный проект, на котором обкатывают технологии для независимого взаимодействия между собой роботов, чтобы те согласовывали действия без участия человека и коллективно могли выполнять одну команду. В будущем такие технологии могут пригодиться.
Как триллионы независимых глупых клеток могут соединиться в умное существо вроде человека, так и из множества маленьких «тупых» роботов, возможно, получится сделать нечто более интеллектуальное. Это лишь первые шаги к тому, что называется коллективным разумом или роевым интеллектом. Великолепный пример такого поведения — колонии муравьёв, которые способны занимать сотни квадратных километров суши, но при этом идеально согласовывают свои действия.
Каждый Kilobot двигается с помощью двух маленьких моторчиков, перемещающих ножки. Инфракрасные приёмник и передатчик позволяют передавать команды ближайшим соседям и измерять дистанцию от них.
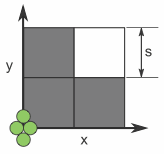 Чтобы сформировать геометрическую фигуру, четыре робота становятся узлом координатной сетки, а остальные получают 2D-картинку для построения — и группируются вокруг четырёх «столбовых», согласовывая своё положение с соседями.
Чтобы сформировать геометрическую фигуру, четыре робота становятся узлом координатной сетки, а остальные получают 2D-картинку для построения — и группируются вокруг четырёх «столбовых», согласовывая своё положение с соседями.
Научная работа инженеров из гарвардского университета опубликована 15 августа 2014 года в журнале Science.
