
Совместная группа из Массачусетского технологического института и Северо-Восточного университета разработала сенсор руки-манипулятора для робота с уникальными «тактильными» характеристиками. Например, такая рука способна поднять со стола кабель USB и аккуратно вставить его в гнездо правильной стороной (разъём USB предусматривает погрешность не более 1 мм во время соединения).
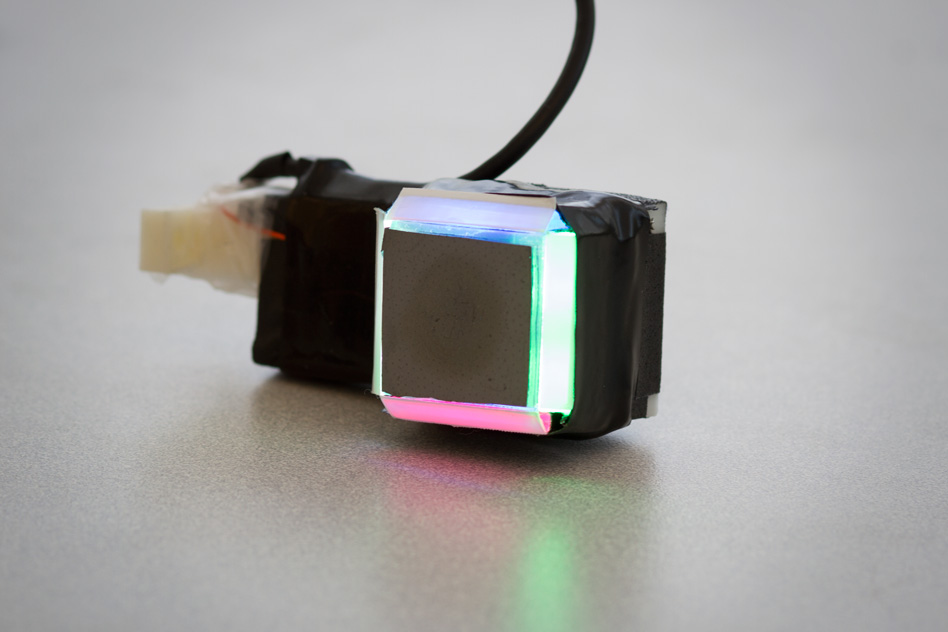
В сенсоре манипулятора используется «тактильная» технология GelSight, разработанная в MIT и впервые описанная в научной литературе в 2009 году. Технология позволяет как бы прощупывать поверхность объектов перед прикосновением. Это делается за счёт снятия отпечатка поверхности подушечкой робопальца, а затем фотографирования рельефной поверхности на подушечке. Перед фотографированием подушечка подсвечивается на близком расстоянии под углом двумя светодиодами.
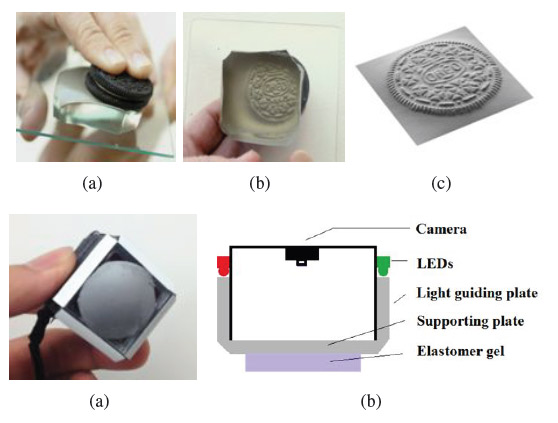
Рельеф сразу проявляется в отражённом свете. Такое вот «прощупывание» с элементами эхолокации.
На хватательную поверхность манипулятора нанесён синтетический каучук, поэтому пальцы нежно прикасаются к объекту и запоминают его форму.

В оригинальном варианте сенсор GelSight различал детали рельефа до 1 микрометра. Новая версия не столь чувствительна, зато меньше по размеру и лучше подходит для робопальцев на механической руке. К тому же, здесь вычисления и обработка изображений происходят быстрее.
В первую очередь, подобные сенсоры пригодятся для промышленных роботов на конвейере, где нужно соблюдать предельную точность при сборке изделий. Но такая точность нужна везде, в том числе в обычных бытовых задачах.
Если сравнивать чувствительность с человеческими пальцами, то здесь GelSight без конкуренции: он различает детали примерно в 100 раз лучше. Но это некорректное сравнение, ведь его светодиодная подсветка сродни человеческому зрению.
