
Содержание статьи
WWW
Я не первый, кто реализовал эту идею. Есть, например, робот из набора Lego Mindstorms или конструкция с сайта Otvinta.com.
Мне не хотелось повторять уже готовое изделие. Чтобы лучше понимать, как функционирует робот, и научиться чему-то новому, я решил делать все сам.
INFO
Подробно о том, как начать свою карьеру в электротехнике, читай в статье «Я у мамы инженер! Как перестать бояться паяльника и начать творить».
Выбираем платформу
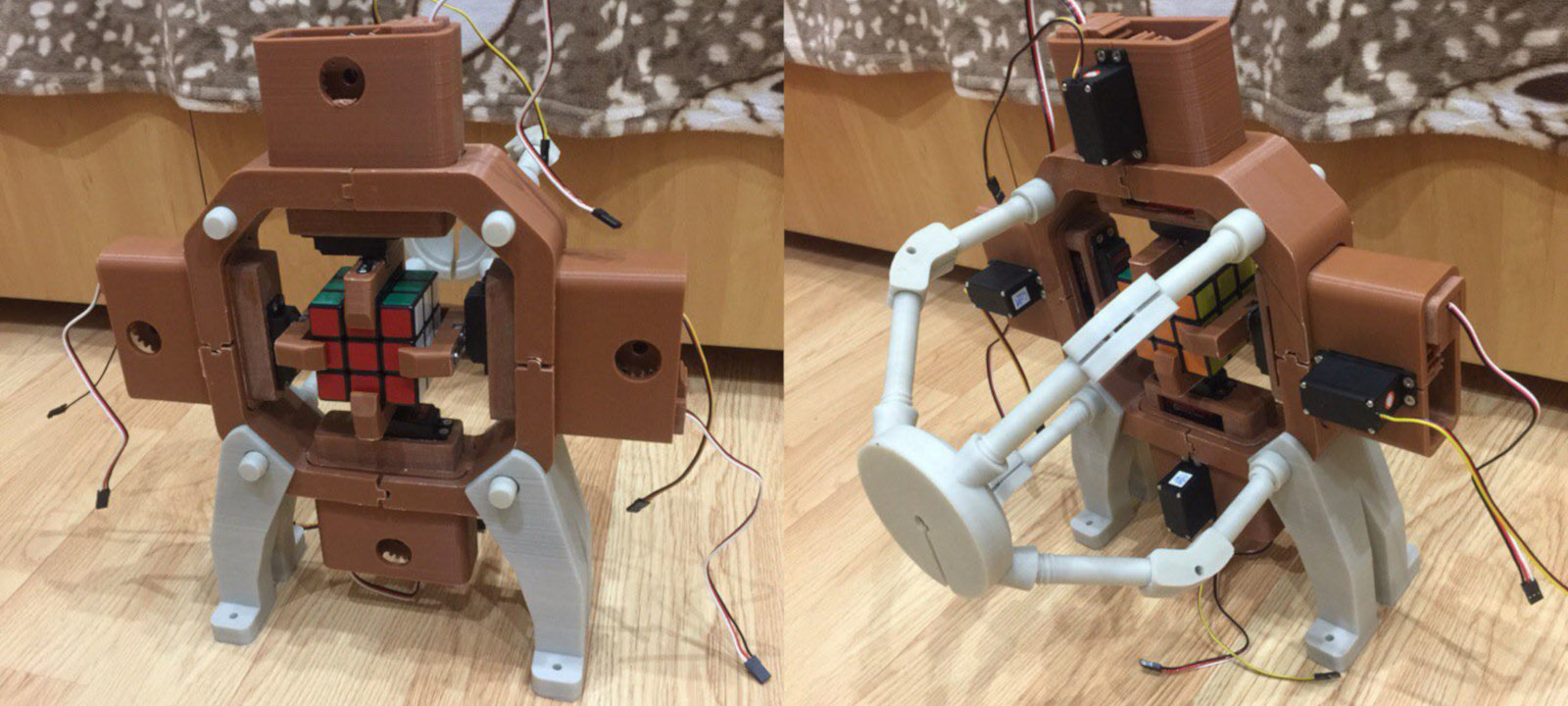
Любой робот состоит из двух основных систем: механической и электронной. Для механической составляющей я рассматривал конструктор Lego, но его наборы могли оказаться очень дорогими, к тому же к нему очень сложно пристроить нестандартные части и блоки. Поэтому я остановился на проекте с сайта Otvinta.com и взял за основу их конструкцию. Ее детали можно легко распечатать на 3D-принтере.
В качестве платформы для электронного блока управления я выбрал смартфон на Android и микроконтроллер Arduino, которые связал по USB. На мой взгляд, такая платформа оптимальна для создания простых и дешевых роботов.
У современных смартфонов есть все необходимое: камера, Bluetooth, Wi-Fi, USB, GPS-датчик, сенсорный дисплей для управления, достаточно мощный процессор и большой объем памяти. Можно использовать бюджетный смартфон, чтобы уменьшить стоимость проекта.
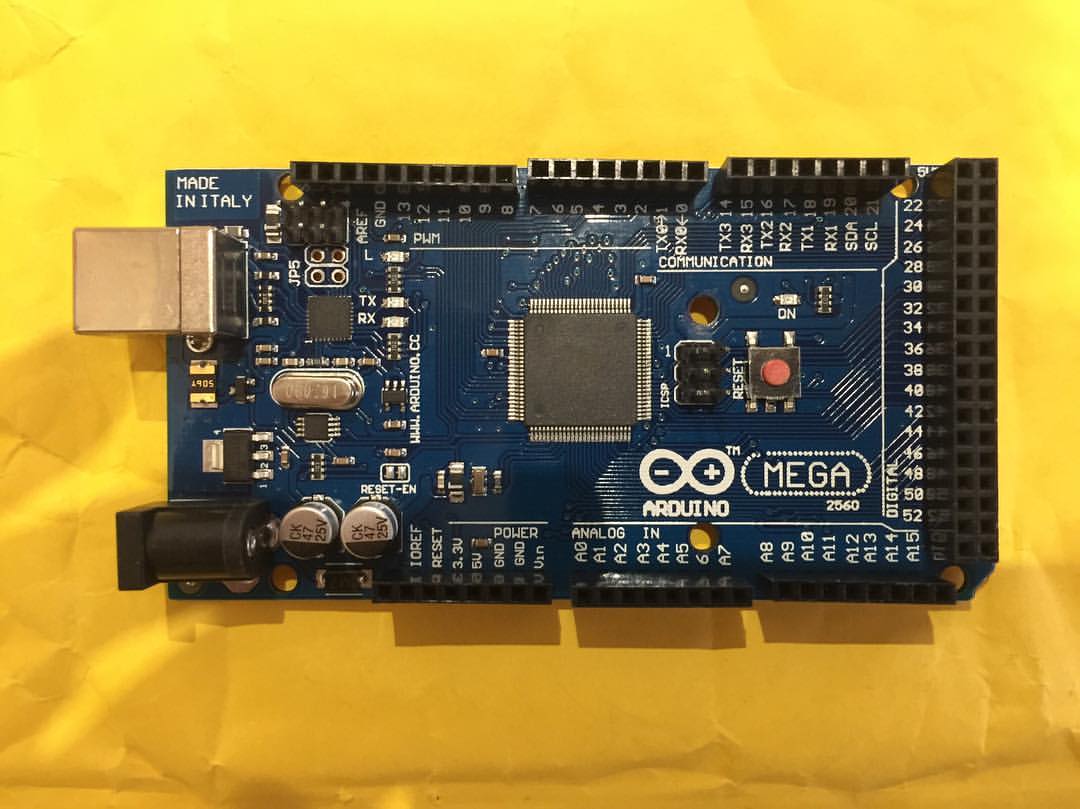
Микроконтроллер Arduino нужен, чтобы отвечать за процессы реального времени: управлять сервоприводами, считывать информацию с внешних датчиков, получать управляющие команды со смартфона по USB и отправлять на него нужные данные.
Мой выбор остановился на смартфоне Motorola Moto G и микроконтроллере Arduino Mega 2560.

Печатаем детали и собираем корпус
Модели всех деталей для корпуса робота можно скачать и распечатать на 3D-принтере (ZIP). Лучше печатать с максимальной точностью. Я этот момент не учел, поэтому детали потом пришлось подправлять с помощью наждачной бумаги.
INFO
Внутри деталей принтер оставляет полости, что сказывается на их прочности. Несколько деталей сломались при сборке, и мне пришлось их склеивать. Поэтому советую распечатывать мелкие детали без полостей внутри.
Сервоприводы советую брать оригинальные, они лучше подходят по конструкции и должны работать надежнее.
Крепеж я купил на строительном рынке. Корпус собирал по инструкции, это оказалось несложно.
Также роботу нужны два блока питания: на 12 В для Arduino и на 5 В для питания сервоприводов.
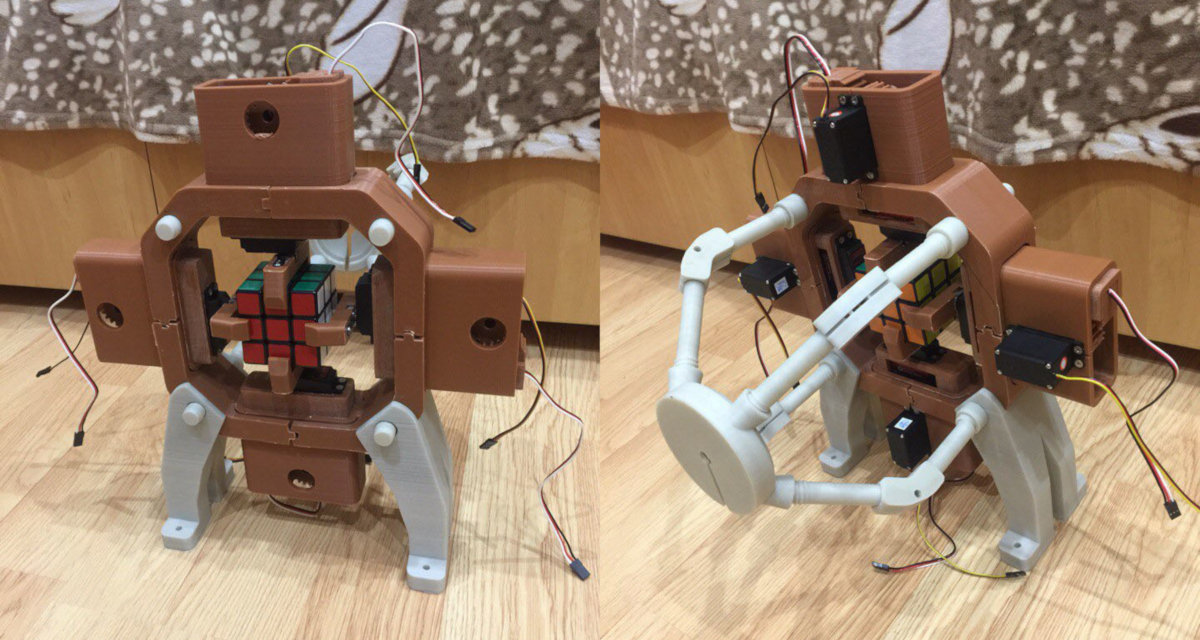
Осталось прикрепить к корпусу робота микроконтроллер Arduino и смартфон. Смартфон приделаем к задней части корпуса с помощью специального держателя таким образом, чтобы его камера была направлена на кубик в центре.
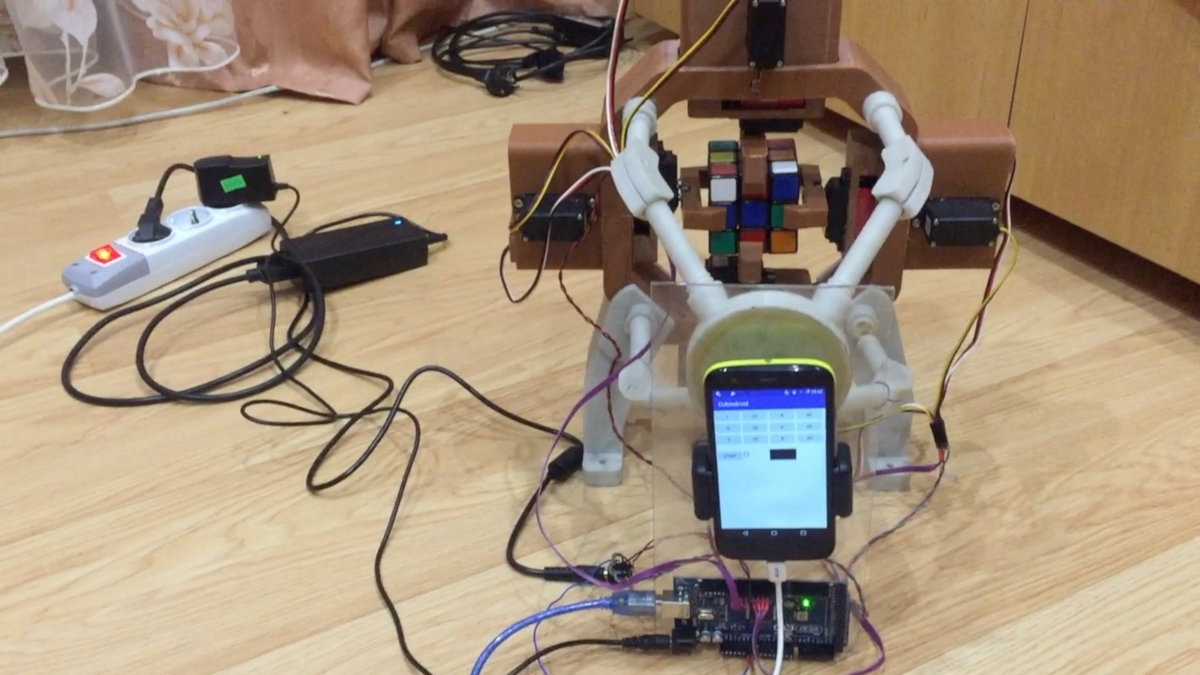
Сервоприводы подключаем к микроконтроллеру и подаем на них питание. Теперь, когда механическая часть робота собрана, мы готовы приступить к написанию программ, которые будут управлять нашим устройством.
Управление сервоприводами
Управлять сервоприводами у нас будет микроконтроллер Arduino Mega 2560. Чтобы написать для него программу, понадобится средство разработки. Arduino IDE свободно распространяется в интернете и работает на любой современной ОС. После ее установки создаем новый скетч для написания исходного кода. Язык программирования похож на C, что сильно облегчит нашу работу.
Продолжение доступно только участникам
Вариант 1. Присоединись к сообществу «Xakep.ru», чтобы читать все материалы на сайте
Членство в сообществе в течение указанного срока откроет тебе доступ ко ВСЕМ материалам «Хакера», позволит скачивать выпуски в PDF, отключит рекламу на сайте и увеличит личную накопительную скидку! Подробнее
Вариант 2. Открой один материал
Заинтересовала статья, но нет возможности стать членом клуба «Xakep.ru»? Тогда этот вариант для тебя! Обрати внимание: этот способ подходит только для статей, опубликованных более двух месяцев назад.
Я уже участник «Xakep.ru»
