Все материалы сюжета:
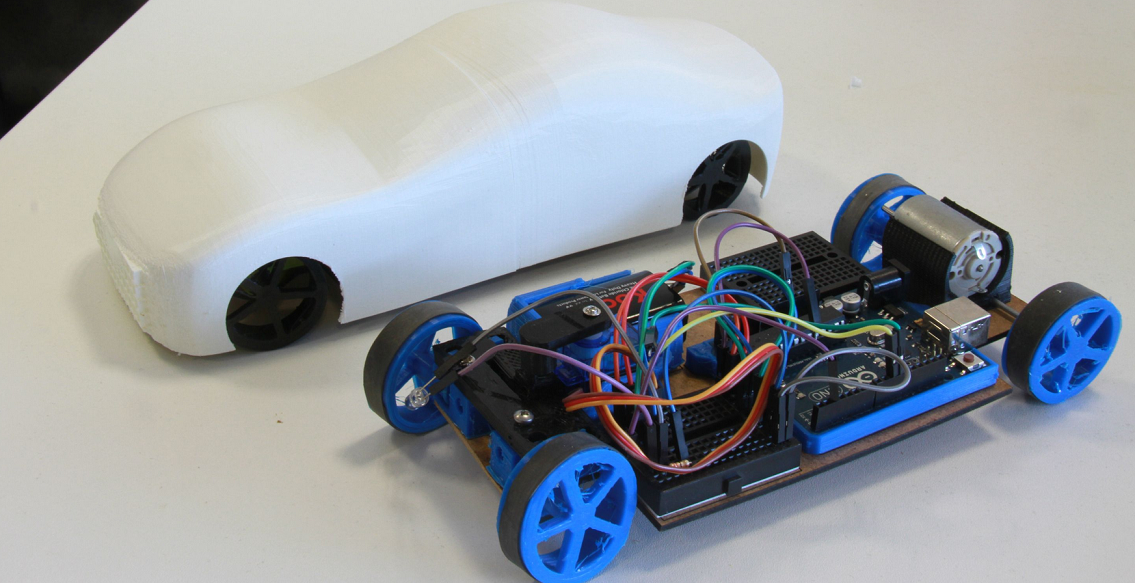
- Собираем роботов-самоходов на Arduino
- Робот для видеонаблюдения на Raspberry Pi
- Тестируем робота без самого робота
На Arduino очень легко делать разные машинки с дистанционным управлением, простыми сенсорами и логикой. Поэтому линейка эта невероятно популярна. Продается множество совместимых с ней сенсоров и плат расширения. Интернет наполнен готовыми программными библиотеками и проектами с открытым исходным кодом на все случаи жизни. Практически все вопросы, которые у тебя возникнут в процессе освоения Arduino, уже кем-то задавались, и ты всегда найдешь ответ.
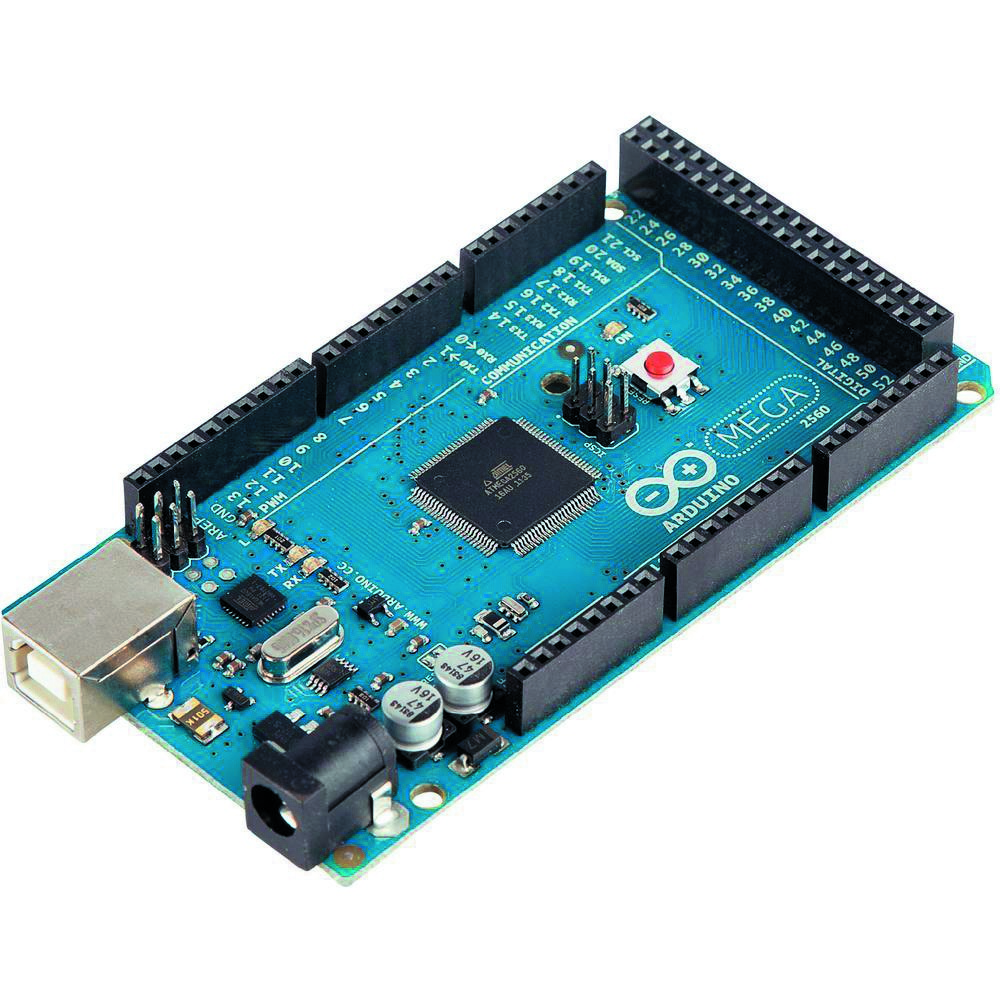
Давай с чего-нибудь начнем? Главный вопрос — выбор контроллера. Существует множество ревизий Arduino, а также сторонних клонов, построенных на основе этих версий. Вот, пожалуй, два самых интересных для нас класса:
- Arduino Uno — лучший выбор новичка, самая простая, бюджетная и распространенная плата. В основе — чип ATmega328 с тактовой частотой в 16 МГц, 32 Кб флеш-памяти, 2 Кб ОЗУ и 1 Кб EEPROM. В Uno 14 цифровых входов/выходов, которые могут использоваться для управления сенсорами и сервоприводами и другими устройствами;


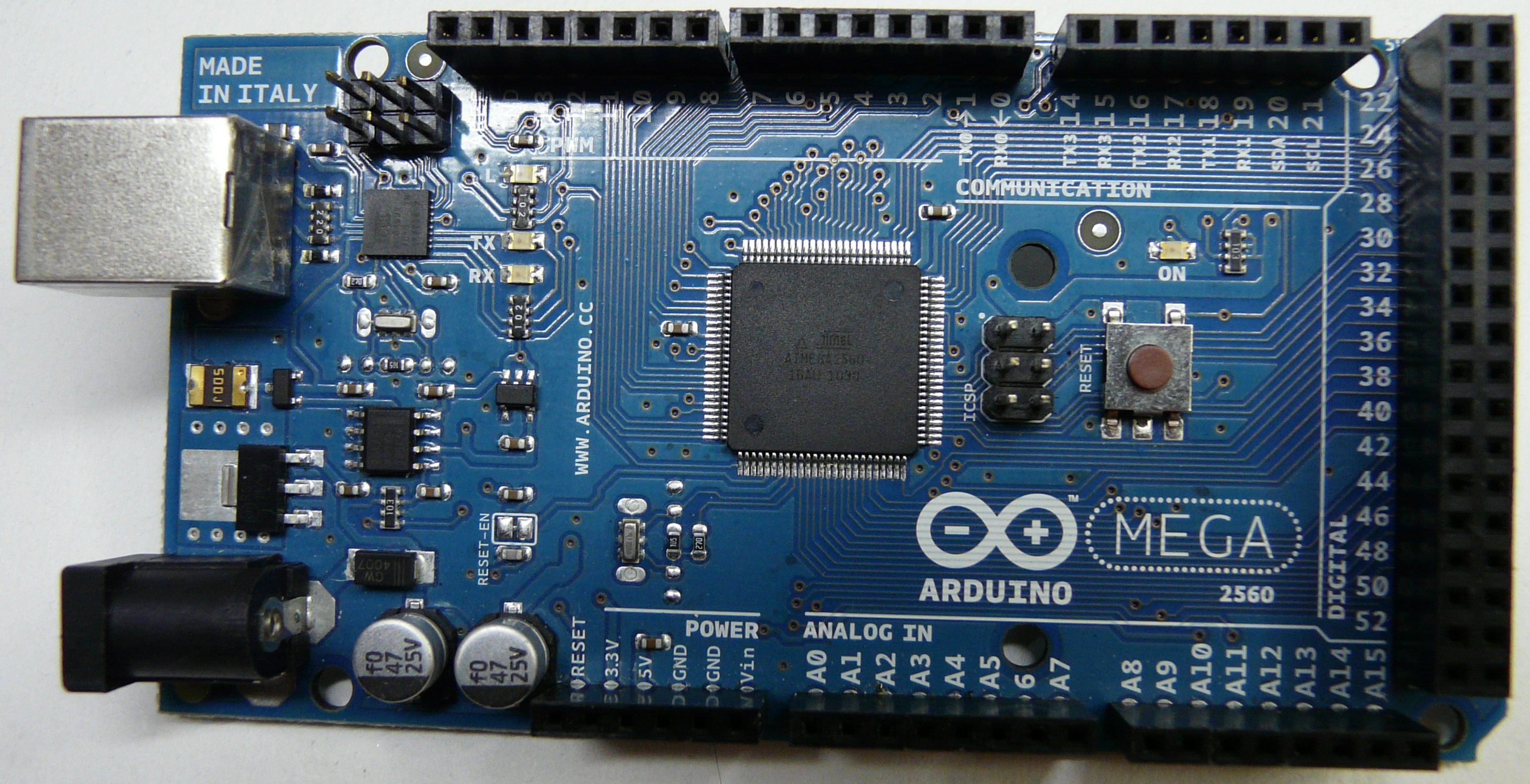
- Arduino Mega / Mega 2560 — плата, которая подойдет в случае, когда ты заранее знаешь, что проект будет сложным. Главное отличие — большее количество входов/выходов (48 в Mega, 54 в Mega 2560). Также тут намного больше памяти: 8 Кб ОЗУ, 4 Кб EEPROM, а флеш-памяти 128 и 256 Кб (в Mega и Mega 2560 соответственно). Между собой платы также отличаются чипом, скоростью USB и некоторыми другими характеристиками.
Разумеется, еще есть Arduino Pro, Arduino LilyPad и многие другие. Но сейчас давай остановимся на первых двух моделях. В нашем случае все довольно просто: Mega нужна для робота с большим количеством ног.
Первый код
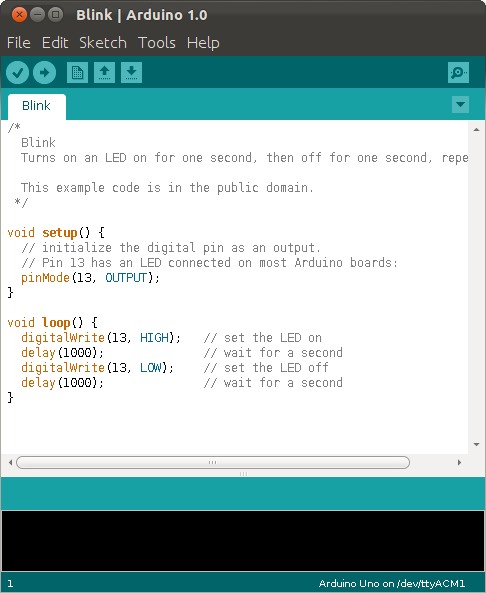
Для начала установим Arduino IDE (arduino.cc) — это кросс-платформенная бесплатная среда разработки. Теперь, если мы подключим наш Arduino, мы сможем попробовать написать первый код на самом простом примере: программе мигания светодиодом. На большинстве Arduino-контроллеров он есть и подключен к пину 13. Кстати, в мире Arduino программы принято называть скетчами. Вот текст скетча с комментариями:
// Дадим этому пину имя LED:
const int LED = 13;
void setup() {
// Инициализация цифрового пина
// для вывода:
pinMode(LED, OUTPUT);
}
void loop() {
// Подать уровень логической единицы
// на пин 13 (зажечь светодиод):
digitalWrite(LED, HIGH);
// Приостановить выполнение скетча
// на секунду:
delay(1000);
// Подать уровень логического нуля
// на пин 13 (потушить светодиод):
digitalWrite(LED, LOW);
// Снова приостановить выполнение
// скетча на секунду:
delay(1000);
}
Обрати внимание на функции setup и loop. Они должны присутствовать в любом Arduino-скетче. Setup вызывается единожды при включении или после перезапуска контроллера. Если хочешь, чтобы код выполнялся только один раз, его следует размещать именно здесь. Чаще всего это всевозможные процедуры инициализации чего-либо. Наш скетч не исключение: цифровые пины Arduino могут работать и как входы, и как выходы. В функции setup мы говорим, что пин 13 будет работать как цифровой выход контроллера.
После того как функция setup завершит свою работу, автоматически запускается замкнутый цикл, внутри которого будет вызываться функция loop. От нас требуется написать, что мы хотим там выполнять. А мы хотим подать на пин 13 уровень логической единицы (5 В), то есть зажечь светодиод, затем подождать одну секунду (1000 в миллисекундах), потом подать уровень логического нуля (0 В) и опять подождать одну секунду. Следующий вызов loop все повторит.
Теперь «заливаем» наш скетч в контроллер. Нет, нам не понадобится программатор. Контроллеры Arduino, кроме наших скетчей, содержат специальную программу — bootloader, которая, в частности, управляет загрузкой кода из компьютера. Так что для заливки скетча нам понадобится только USB-кабель и пункт меню File → Upload (Ctrl + U) в Arduino IDE.
WWW
Код нашего helloworld: bit.ly/1apjkPW
Ключевой вопрос
А сколько, собственно, нам нужно ног? Определимся во множестве конфигураций шагающих роботов. По количеству ног:
- biped — двуногий (прототип — человек);
- quadruped — четвероногий (прототип — большинство млекопитающих животных);
- hexapod — шестиногий (прототип — большинство насекомых);
- octopod — восьминогий (прототип — пауки, скорпионы, крабы и другие членистоногие).
Кроме количества ног, важна и конфигурация каждой. Главной характеристикой ноги является количество степеней свободы, или dimensions of freedom (DOF). Степень свободы — это способность поворачиваться или изгибаться вокруг одной оси (реже — поступательно двигаться вдоль нее). Очевидно, что если степень свободы одна, то на такой ноге далеко не уйдешь. Ноги с двумя степенями свободы (2DOF) уже позволяют двигаться многоногим роботам, хотя 2DOF дает возможность свободно перемещать кончик ноги только в одной плоскости. А 3DOF-нога перемещает «стопу» в 3D-пространстве (если, конечно, не все три оси параллельны). Есть и 4DOF-ноги, которые просто увеличивают гибкость и диапазон перемещения ноги. У насекомых чаще всего 4DOF-лапы.
Что это значит для нас? В дешевых любительских роботах каждую степень свободы реализует один двигатель, точнее, сервопривод, или серв. Конфигурация ног однозначно определяет, сколько таких сервов нужно. Так, 3DOF-гексапод потребует 18 сервов, а 4DOF-паук — уже 32. Не пугайся количества, маленькие сервоприводы, используемые в любительских радиоуправляемых моделях, очень дешевы. В интернет-магазинах их можно найти по запросу micro servo.
Чтобы программировать сервоприводы, достаточно знать, что в них уже есть контроллер, который делает основную работу. И все, что нужно, — подавать питание и цифровой сигнал, сообщающий контроллеру, в какую позицию мы хотим повернуть вал привода. Об их конструкции легко найти информацию. Протокол у них самый простой из всех цифровых протоколов связи: широтно-импульсная модуляция — ШИМ (PWM на английском). У всех простых сервов есть разъем с тремя контактами: земля, +5 В (вольтаж может отличаться в зависимости от размера и мощности) и сигнальный вход. Arduino-контроллеры могут двумя различными способами генерировать такой сигнал. Первый — аппаратный PWM, который сам чип умеет выдавать на нескольких из своих цифровых I/O-пинов. Второй — программный. Программный позволяет получить одновременно больше различных PWM-сигналов, чем аппаратный. Для него под Arduino предоставляется удобная обертка — библиотека Servo. Она позволяет использовать одновременно 12 сервоприводов на большинстве малогабаритных контроллеров (Uno, Due, Nano) и 48 сервоприводов на Arduino Mega и ему подобных. Сигнальный контакт серва подключается к цифровому выводу Arduino. Земля и питание — очевидно, к земле и питанию, они могут быть общими для всех сервов. В трехпроводных шлейфах сервов черный или коричневый — это земля, посередине обычно красный +5 В и, наконец, белый или желтый — сигнальный. С программной точки зрения управление предельно простое:
Servo myservo;
// Сервопривод на 9-м пине Arduino
myservo.attach(9);
// Повернуть в положение на 90º
myservo.write(90);
Большинство сервов умеют вращать вал на 180°, и для них 90° — среднее положение. Для упрощения подключения сервов к плате Arduino существует ряд решений. Самое каноничное — это Sensors Shield. Установив его на Uno и подав на клеммы питание для сервов, можно их разъемы подключать прямо в него.
Батарея
Еще один важный вопрос — питание. Если у тебя продвинутая плата, которая позволяет снабжать всю систему по одной линии питания (и двигатели сервов не дадут помех в работу контроллера), то можно обойтись одним источником. Выбор огромен, лучше всего, конечно, Li-Ion/Li-Po брикеты для радиомоделек. Но им нужны и соответствующие зарядные устройства. Если у тебя контроллер попроще (Uno/Due/Nano), то можно питать его отдельно, например 9-вольтовой «Кроной», а сервоприводы подключить к основной мощной батарее. Так сервоприводам точно хватит питания. В случае литиевых аккумуляторов нужно еще тщательней, чем обычно, следить за напряжением, чтобы не было переразряда (допустимые напряжения стоит уточнить для конкретного типа батареи). Для этого на робота-Слейпнира, о котором дальше пойдет речь, также прикручен маленький цифровой вольтметр.
Робожук своими руками

Набор
- Контроллер Arduino Uno: 1150 р.
- Три серводвигателя. Я использовал HXT500, 200 р. за штуку
- Батарейный отсек для «Кроны» с выключателем: 50 р.
- Батарейка «Крона»: 145 р.
- ИК-приемник: 90 р.
- Стальная проволока диаметром примерно 1,5 мм. Я, к примеру, использовал сломанный венчик для взбивания яиц
Итого: 2035 р.
DmitryDzz: Я хочу предложить тебе сделать небольшого дистанционно управляемого шестиногого робожука на базе контроллера Arduino Uno. Лапки будут иметь одну степень свободы, управление будет происходить с помощью обычного ТВ-пульта.
Надо сказать, что это цены дорогих московских магазинов. В китайских интернет-магазинах все это обойдется раза в два дешевле. Считая доставку. Правда, ждать придется, по моему опыту, от двух недель до трех месяцев.
Более простой способ — взять набор-конструктор, потому что на первых шагах одного контроллера будет мало. Сейчас много магазинов предлагают такие наборы. Например, есть замечательный интернет-магазин «Амперка». Здесь тебе предложат несколько подобных конструкторов, отличающихся наполненностью и, конечно, ценой. Мне вполне хватило самого простого — «Матрешка X». В него входит контроллер Arduino Uno, USB-кабель для подключения к компьютеру, доска для прототипирования (незаменимая вещь!), набор перемычек, светодиоды, резисторы и прочая мелочь.
В этом же магазине есть раздел «Вики», где ты найдешь даже замечательные короткие видеоуроки, переведенные на русский язык. Обязательно посмотри их. И конечно, есть форум, где тебе наверняка постараются помочь.
Что понадобится из инструментов:
- паяльник и все, что нужно для пайки. Паять много не придется, и особого мастерства не потребуется;
- термоклеевой пистолет и стержни к нему;
- пассатижи для работы с проволокой.
Если все собрали, приступим!
Управление
Перейдем к первому шагу: нам надо научиться взаимодействовать с пультом ДУ и выведать коды нажатий на некоторые его кнопки. Эти коды потом пригодятся для скетча управления роботом.
На этом этапе понадобится еще ИК-приемник и хорошо бы иметь доску для прототипирования. Подавляющее большинство ИК-пультов работают на несущих частотах 36 кГц, 38 кГц или 40 кГц (Panasonic, Sony). Исключение составляют пульты Sharp (56 кГц), Bang & Olufsen (455 кГц) и, может, кто-то еще более экзотический. Поэтому нам вполне подойдет любой ИК-приемник на 36, 38 или 40 кГц. Частота может точно не совпадать с несущей частотой сигнала. В таком случае чувствительность приемника будет снижаться, но на практике я не заметил дискомфорта, используя ИК-приемник TSOP2136 (36 кГц — последние две цифры — частота) и пульт ДУ Sony (40 кГц).
Итак, для большинства пультов подойдут ИК-приемники TSOP21xx, TSOP22xx, TSOP312xx. Две последние цифры могут быть 36, 37, 38 или 40. Перед включением ИК-приемника уточни разводку его контактов — их всего три: +5V (питание), GND (земля), Vs (выход). Соберем схему, как на иллюстрации (разводка для TSOP2136).
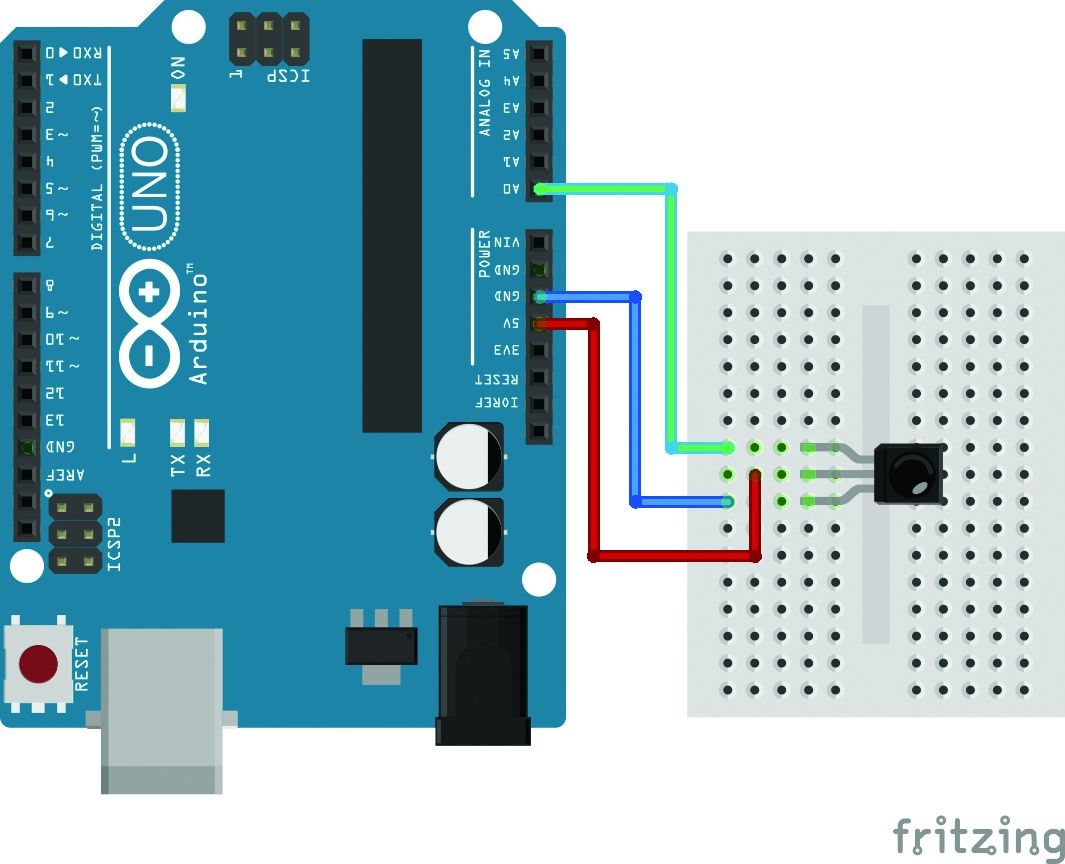
Как видишь, к аналоговому входу контроллера A0 мы подключили выход ИК-приемника.
Вот как выглядит код скетча:
#include "IRremote.h"
// Аналоговый вход контроллера,
// к которому подключен ИК-приемник:
const int IR_PIN = A0;
// Создаем объект ИК-приемник:
IRrecv irrecv(IR_PIN);
void setup() {
Serial.begin(9600);
Serial.println("ready");
// Начинаем прослушивание ИК-
// сигналов:
irrecv.enableIRIn();
}
void loop() {
// Описываем структуру results,
// в которую будут помещаться
// принятые и декодированные
// ИК-команды:
decode_results results;
// Если ИК-команда принята и успешно
// декодирована, то выводим
// полученный код в последовательный
// порт контроллера:
if (irrecv.decode(&results)) {
Serial.println(results.value);
irrecv.resume();
}
}
В скетче используется специальная библиотека IRremote.h, декодирующая сигналы самых разных ИК-пультов. Эта библиотека — открытый проект, скачать ее ты можешь со страницыhttps://github.com/shirriff/Arduino-IRremote. А чтобы ее подключить к нашему проекту, надо выполнить три действия:
- каталог библиотеки скопировать в каталог libraries, который, в свою очередь, находится в инсталляционном каталоге Arduino IDE;
- перезапустить IDE;
- добавить в начало нашего скетча строку #include "IRremote.h".
Теперь в скетче будут доступны функции декодирования ИК-сигналов. Но, чтобы увидеть полученные коды, мы еще будем использовать объект Serial. С его помощью по последовательному порту (все тот же USB-кабель) мы будем передавать коды на компьютер. В функции setup мы выполняем инициализацию объекта Serial. «9600» — это 9600 бод — скорость, которая будет использоваться для передачи данных. После инициализации мы можем производить запись в последовательный порт с помощью функции println. Для просмотра результата этого вывода на компьютере в Arduino IDE выбери пункт меню Tools → Serial Monitor (Ctrl + Shift + M). Только убедись, что в нем установлена скорость 9600 бод.
Итак, питание контроллер получает по USB-кабелю, данные передает по нему же. Загружаем скетч, запускаем Serial Monitor и начинаем жать кнопки пульта ДУ. В окне Serial Monitor должны появляться коды. Протоколы пультов отличаются, иногда это может быть один код, иногда несколько. В любом случае ты всегда можешь выделить коды, уникальные для каждой кнопки пульта.
Нам потребуется 13 кнопок пульта. Я использовал следующие:
- 1 — плавный поворот налево;
- 2 — движение вперед;
- 3 — плавный поворот направо;
- 4 — поворот налево на месте;
- 5 — стоп;
- 6 — поворот направо на месте;
- 7 — движение назад с поворотом направо;
- 8 — движение назад;
- 9 — движение назад с поворотом налево;
- синяя кнопка — очень медленно;
- желтая — медленно;
- зеленая — быстро;
- красная — очень быстро.
Запиши коды этих кнопок, позже они понадобятся для скетча управления роботом.
Алгоритм движения
Скетч управления роботом доступен на странице нашего проекта (bit.ly/1dEwNDC). Не забудь изменить значения констант кодов нажатых кнопок пульта на коды своего пульта (константы IR_COMMAND_XXX_CODES в файле ir_command_codes.h).
Скетч подробно мы разбирать не будем, думаю, достаточно комментариев в коде, но один вопрос все же стоит рассмотреть.
Движения насекомых очень интересны. И хоть всем этим жукам падать до земли совсем недалеко, они почему-то всегда устойчивы: в любой момент времени минимум три ноги (две с одной стороны и одна с другой) стоят на поверхности. И пока эти ноги тянут жука к одному ему ведомой цели, три другие подтягиваются, чтобы повторить это движение. Наша задача — сделать что-то похожее.
У нашего робожука три серводвигателя, расположенные в ряд перпендикулярно движению. У левого и правого серводвигателей ось вала направлена вверх, а у центрального — вперед. Задача, например, левой сервомашинки — качать сразу две ноги: левую переднюю и левую заднюю. Они, кстати, жестко соединены между собой и приклеены к качалке этой сервомашинки. Задача центральной сервы — приподнимать то левый бок жука, то правый. Поэтому к качалке этого двигателя крепятся центральные левая и правая ноги, представляющие собой единую П-образную деталь.
Скетч должен обеспечивать движение робота вперед, назад, плавные повороты в движении и повороты на месте. А еще хотелось бы управлять скоростью жука. Чтобы описать эти движения программно, нам пригодится математика. Посмотри на схему.
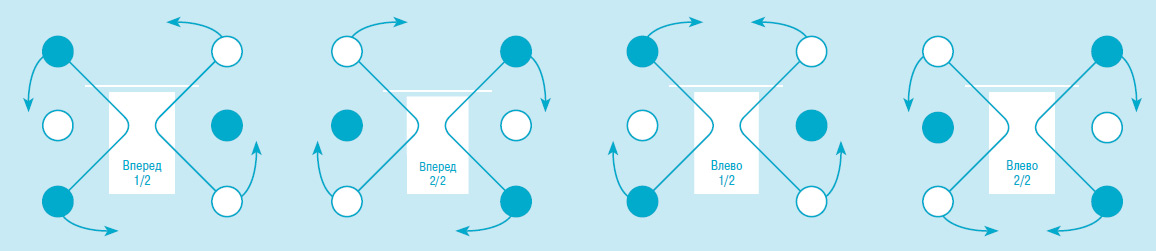
Синими кружками обозначены ноги робожука, стоящие на поверхности, а белыми — находящиеся в воздухе. Обрати внимание, что при движении вперед или назад левый и правый серводвигатели должны двигаться абсолютно одинаково. А при поворотах на месте двигатели должны крутиться в разных направлениях (симметрично). Еще интересно, что движение вперед и назад отличается только фазой центрального серводвигателя.
Итак, как это реализовано? Мы помним, что контроллер постоянно вызывает функцию loop. Значит, в эту функцию мы должны поместить код, который определяет текущее положение серводвигателей и устанавливает их в это положение. Каждый серводвигатель должен совершать колебательные движения. Рассчитать положение серводвигателя в момент времени t мы сможем по следующей формуле:
X = A sin(2πt/T),
где X — искомое положение серводвигателя, A — амплитуда колебаний, T — период колебаний.
Так, в зависимости от момента времени t мы получим изменение величины X в интервале от –A до +A. Серводвигатели могут принимать положение в диапазоне от 0 до 180°. Поэтому колебания нам лучше производить вокруг «нулевого» положения в 90°. И если мы хотим обеспечить колебания с периодом 1 с вокруг положения 90° с амплитудой 30°, то формула преобразуется в следующий вид:
X = 90 + 30 sin(2πt/1000),
где t — это время в миллисекундах, прошедшее от начала колебаний. Для управления скоростью движения робожука мы можем изменять период колебаний. Чем он больше, тем ниже скорость.
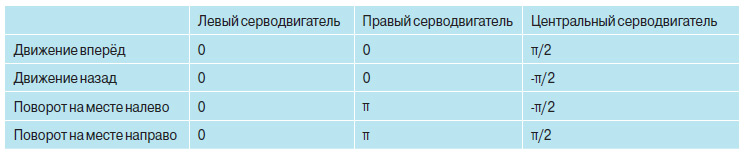
А теперь еще раз вернемся к нашей схеме, потому что формула, написанная выше, еще не завершена. Как обеспечить то синхронное, то встречное движение левого и правого серводвигателя? Как менять фазу центрального серводвигателя? Мы должны добавить в нашу формулу фазу колебаний. Сдвиг аргумента синуса на величину π для, например, правого двигателя заставит его работать в противофазу левому, то есть так, как нам надо для поворота на месте. Вот как теперь будет выглядеть наша формула:
X = 90 + 30 sin(2πt/1000 + Φ),
где Φ — фаза колебаний, значение от 0 до 2π.
Посмотри на таблицу, чтобы понять, какими должны быть фазы колебаний для серводвигателей применительно к каждому типу движения.
Сборка
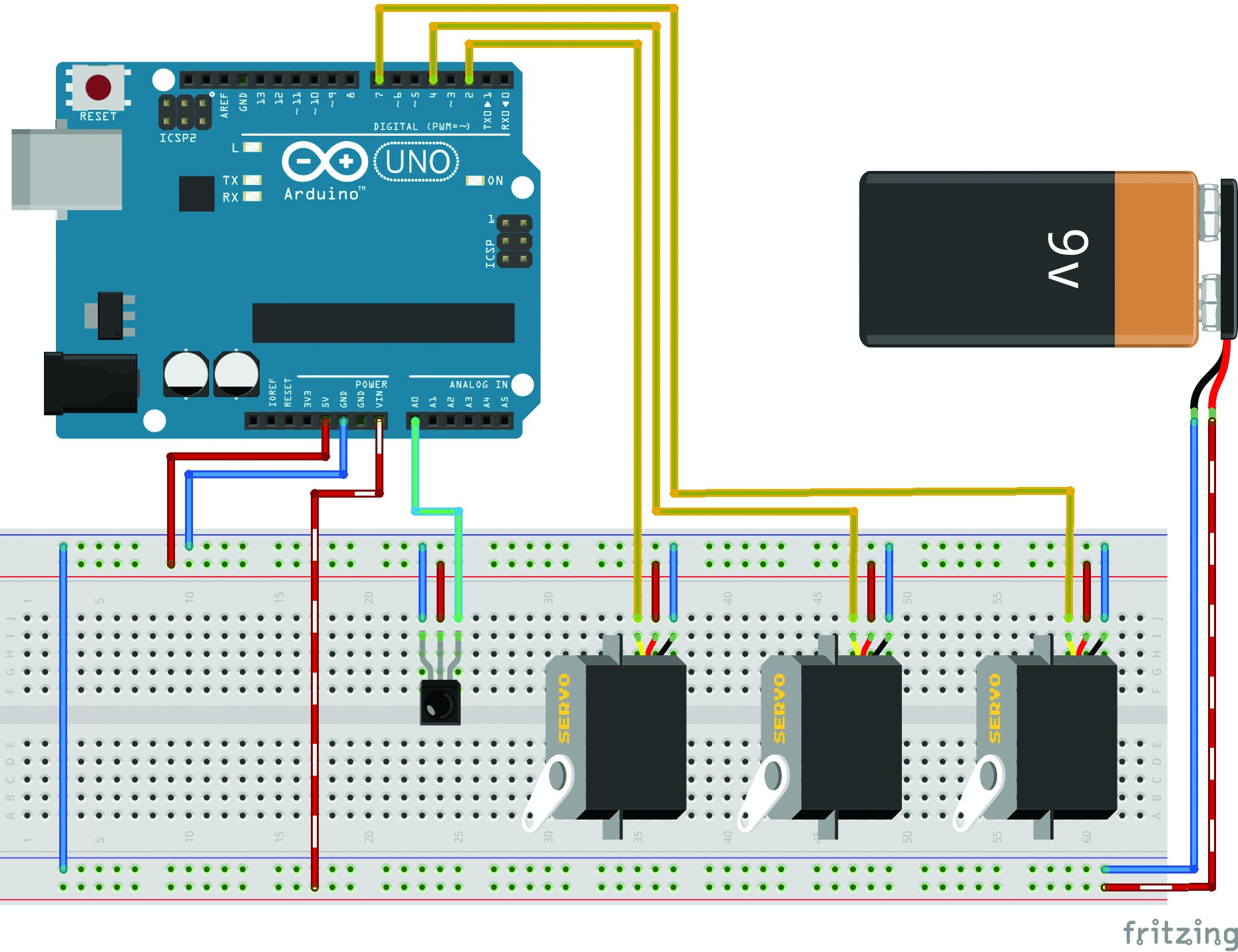
Теперь давай соберем робота на доске для прототипирования и зальем скетч управления.
Это очень важный этап перед сборкой. Попробуй отключить USB-кабель и запитай макет от батарейки «Крона». Проверь все фазы движения и убедись, что все работает. После сборки робота что-либо менять (например, заменить неработающий серводвигатель) будет уже сложнее.
Теперь перейдем к самой сборке. Основной несущий элемент — это батарейный отсек. Я советую использовать отсек закрытого типа и обязательно с выключателем.
Закреплять детали жука проще всего термоклеем. Начни с серводвигателей. Удали ненужные ушки креплений и соедини машинки между собой. Затем приклей эту сборку из трех «серв» к крышке батарейного отсека. Не забывай, что батарейный отсек должен свободно открываться для смены батарейки.
Контроллер проще всего приклеить к отсеку, но мне этот вариант не очень нравится, так как придется навсегда отдать Arduino Uno жуку. Поэтому можно усложнить себе жизнь и использовать разъемы Arduino для крепления батарейного отсека. На нижней части отсека приклей штырьковый разъем с шагом между штырьками 2,54 мм. Он должен располагаться так, чтобы входить в гнездо контроллера в районе цифровых выводов 8–11. Они пока все равно нам не понадобятся. Если разъема под рукой не оказалось, подойдет П-образно изогнутая канцелярская скрепка.
Провода, идущие от батарейного отсека, надо соединить с выводами Vin и соседним с ним GND. Не перепутай полярность! Плюс «Кроны» на Vin, минус на GND. Чтобы обеспечить надежный контакт проводов с Arduino-разъемами, можно просто облудить кончик провода потолще, я же как штекер использовал короткий отрезок скрепки. А место пайки закрыл термоусадочной трубкой.

Разъемы со шлейфов сервоприводов следует срезать, провода питания (+5 В — обычно красный и GND — черный или коричневый) надо объединить и вывести к гнездам 5V и соседнему с ним GND на контроллере. Подключать будем чуть позже. Провода управляющего сигнала (обычно желтый) выводим на цифровые выводы контроллера: левый серводвигатель на пин 2, центральный на пин 4, правый на пин 7.
«+» и «–» ИК-приемника можно просто вставить в разъем Arduino (5V и соседний GND). Правда, согнув пополам, удвоив их толщину. К этим же ножкам питания ИК-приемника припаиваем ранее подведенные провода питания серводвигателей. Выход сигнала ИК-приемника до аналогового входа контроллера А0 уже вряд ли дотянется, и тебе придется наращивать его проводом.
Несколько советов по изготовлению ног. Сначала подготовь левую и правую «передне-задние» ноги. Убедись в их симметричности (обрати внимание и на длины, и на углы изгибов). Начинай клеить ноги, только убедившись, что серводвигатели установлены в «нулевое» положение (90°).
Среднюю пару ног лучше устанавливай в последнюю очередь. Советую сначала сделать средние ноги длиннее, а затем после установки подрезать их до нужной длины. В «нулевом» положении все шесть ног должны стоять на поверхности. Качение средних ног с амплитудой 15° не должно мешать поворотам «передне-задних».
WWW
- Страница проекта: bit.ly/19CiNJF
- Код работы с пультом: bit.ly/1eROe0j
- Код управления движением: bit.ly/1dEwNDC
Что дальше?
Робожук — это готовая мобильная платформа на базе одного из самых популярных и доступных контроллеров. Проект открытый: https://github.com/beetle-ringo/arduino. Делай в GitHub форк (ответвление) и добавляй свою функциональность. Дай волю фантазии — добавь ИК-светодиод, и робот готов для робобитвы. Подключи дальномеры, тактильные сенсоры, гироскоп… Научи робота обходить препятствия или ходить по линии, попробуй установить на него веб-камеру. Идей может быть миллион, и ты всегда можешь выбирать самую интересную.
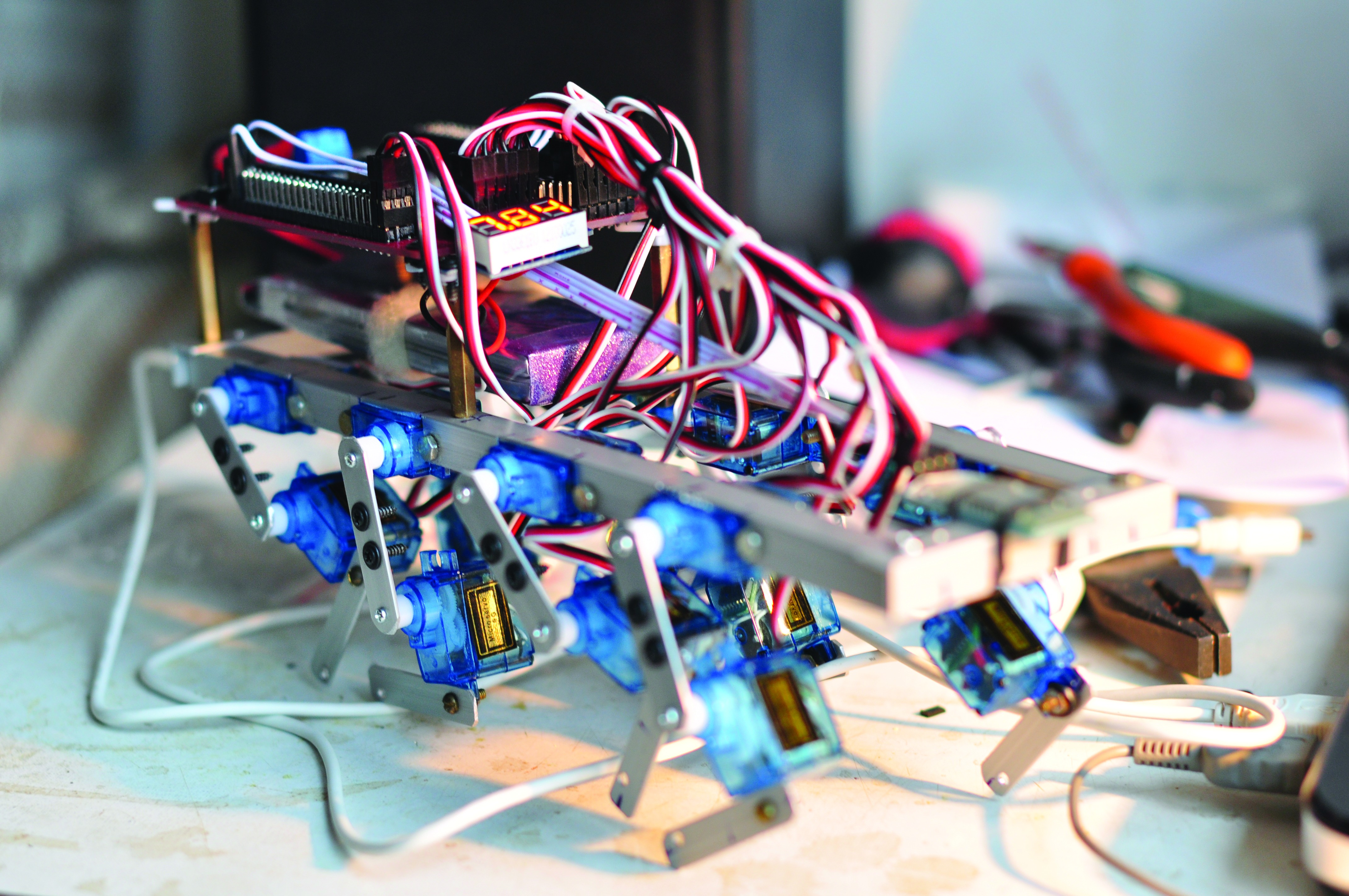
Робот-Слейпнир
Набор
- Контроллер Arduino Uno Dagu Spider Robot: 2530 р.
- Сервоприводы SG90 9g (16 штук) 1150 р.
- Аккумулятор LiPo battery pack, 7,4 В, 1800 мА • ч 490 р.
- Радиомодуль 4 Pin Bluetooth RF Transceiver 270 р.
- Индикатор напряжения (опционален) DC 3,3–30 В Red LED Panel Meter 100 р.
- Уголок алюминиевый. В ближайшем строймаркете 135 р.
- Болтики и гайки. На ближайшей барахолке 35 р.
Итого: 4710 р.
*Компоненты покупались в разное время, и многие позиции можно оптимизировать
poconoco: Попробуем собрать нестандартную конфигурацию — восьминогого 2DOF-робота. 2DOF-ноги намного проще программировать, к тому же у меня есть в запасе куча неиспользованных сервоприводов. А главное, можно будет назвать его в честь восьминогого коня бога Одина Слейпниром (всегда мечтал!).
У нашего Слейпнира с каждой стороны будет по четыре ноги с двумя шарнирами. Каждый шарнир — сервопривод, значит, восемь сервоприводов на сторону. Для простоты все восемь шарниров одной стороны коня будут вращаться в одной плоскости. Хотя это вовсе не обязательно. Более того, если ноги с одной стороны пустить немного «шахматкой», чтобы две соседние ноги не могли задеть друг друга, это будет даже лучше, позволит делать шире шаг и скакать галопом.
Аккуратное и функциональное, но далеко не самое дешевое решение — использовать нестандартную плату контроллера, оптимизированную для подключения сервоприводов в большом количестве. Мне подвернулась Dagu Spider Robot Controller — это тот же самый Arduino Mega, но на плате с заранее распаянными 3-пиновыми штырьковыми разъемами, куда сразу, без всяких шилдов, можно подключить те самые 48 сервоприводов. Идеальна для многоногих роботов на Arduino.
Управление
Управление у нас будет происходить по Bluetooth. Для этого есть различные аппаратные решения. Это и шилды, и отдельные платки с UART последовательным интерфейсом (как обычный ком-порт, только с уровнями сигналов 5 В). Мне самой практичной показалась именно маленькая платка с UART-интерфейсом. Подключается к соответствующим контактам UART/Serial порта Arduino. Отметим два нюанса: на Uno/Due/Nano и подобных всего один такой порт, и он же используется для прошивки через USB. Поэтому, возможно, потребуется отключать Bluetooth-модуль на время прошивки. А второй нюанс — не забывай, что RX-контакт модуля подключается к TX-контакту Arduino, а TX — к RX. Такие дела в UART.
Программирование Bluetooth не сложнее сервов, данные можно побайтово вычитывать, чем мы и будем пользоваться:
char cmd;
Serial.begin(9600);
if (Serial.available())
cmd = Serial.read();
Если используется Arduino Mega и Bluetooth подключен ко второму порту, то вместо Serial пишется Serial1. Примечательно, что можно и не использовать Bluetooth, а управлять роботом прямо по USB. И в коде выше не изменится ничего! Это просто работа с последовательным портом, а висит ли там BT-передатчик или преобразователь USB Serial — нам неважно.

Другая сторона Bluetooth
Самый удобный способ подключения — это стандартные утилиты Linux. Для работы нам понадобятся утилиты sdptool, rfcomm (входят в состав пакета bluez в репозиториях Ubuntu), а также minicom (пакет так и называется). Инструкции по работе с этими утилитами можно найти в Сети.
Алгоритм движения

Для гексапода самой простой походкой будет такая: ноги делятся на две группы по три ноги, и одна из групп полностью на земле, другая — в воздухе, переставляется вперед. Это далеко не единственная возможная походка. Можно в воздухе держать только две лапы или даже одну, а остальные четыре или пять — на земле. Для октапода походок тоже множество. Мы возьмем самую простую, также с двумя группами по четыре ноги.
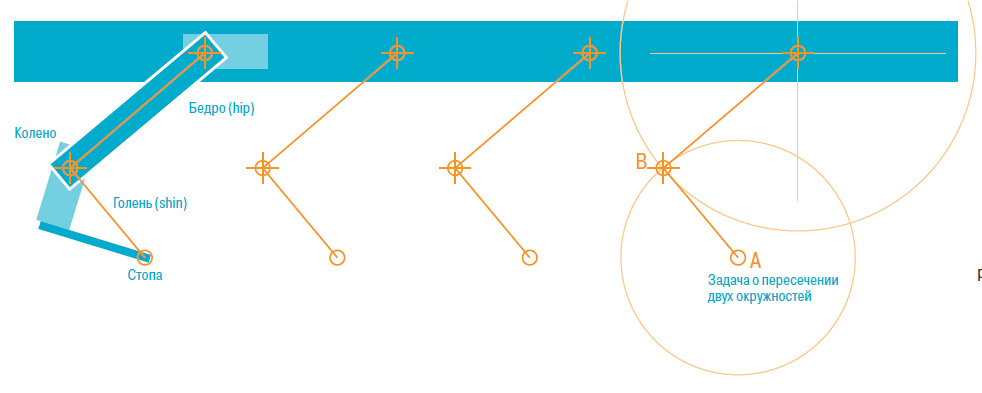
Итак, что нам нужно делать для работы с 16 сервоприводами и выбранной походкой? Правильный ответ — читать про инверсную кинематику (ИК). Объем статьи не позволяет развернуть тему широко, но материалов в интернете предостаточно. Вкратце, ИК решает задачу нахождения необходимых управляющих сигналов для того, чтобы система в пространстве заняла нужное положение. Для ноги это значит, что по координатам точки, куда должна попасть стопа, следует определить углы сервоприводов, которые для этого нужно выставить. А управляя координатами стоп, можно управлять положением тела. У нас 2DOF-ноги, оси параллельны, поэтому стопа перемещается всегда в одной плоскости. Задача ИК в данном случае сводится к 2D-пространству, что сильно ее упрощает.
Пускай для каждой ноги локальным началом координат O будет вал верхнего серва, то есть бедра. И у нас есть координаты точки A, куда нужно попасть стопе. Тогда легко увидеть, что нужно решить задачу нахождения точек пересечения двух окружностей (см. схему ног одной стороны, там на самой правой ноге это проиллюстрировано). Найдя точку B пересечения окружностей (выбрав любую из них), несложно посчитать искомые углы, используя перевод из декартовых координат в полярные. В коде решение этой задачи выглядит так:
float A = -2 * x;
float B = -2 * y;
float C = sqr(x) + sqr(y) +
sqr(hipLength) - sqr(shinLength);
float X0 = -A * C / (sqr(A) + sqr(B));
float Y0 = -B * C / (sqr(A) + sqr(B));
float D = sqrt( sqr(hipLength) -
(sqr(C) / (sqr(A) + sqr(B))) );
float mult = sqrt( sqr(D) / (sqr(A) +
sqr(B)) );
float ax, ay, bx, by;
ax = X0 + B * mult;
bx = X0 - B * mult;
ay = Y0 - A * mult;
by = Y0 + A * mult;
// или bx для другой точки пересечения
float jointLocalX = ax;
// или by для другой точки пересечения
float jointLocalY = ay;
float hipPrimaryAngle =
polarAngle(jointLocalX, jointLocalY);
float hipAngle = hipPrimaryAngle -
hipStartAngle;
float shinPrimaryAngle = polarAngle
(x - jointLocalX, y - jointLocalY);
float shinAngle = (shinPrimaryAngle -
hipAngle) - shinStartAngle;
где x и y — координаты точки, куда нужно дотянуться стопой; hipStartAngle — угол, на который повернуто «бедро» изначально (при среднем положении серва), аналогично — shinStartAngle. Кстати, в этих расчетах углы, очевидно, в радианах, а в объекты Servo их передавать нужно уже в градусах. Полный работоспособный код прошивки, включающий этот кусочек, выложен на GitHub, см. ссылку в конце статьи. Это кусок ИК, но кроме него нужно еще немного довольно простого кода, чтобы использовать эту ИК на всех ногах (см. функции legsReachTo(), legWrite()). Также необходим будет код, который собственно реализует походку — движение одной группы ног «назад» (чтобы робот двигался вперед), в то время как другая группа ног приподнимается и переставляется вперед для следующего шага, см. функцию stepForward(). Она делает один шаг с заданными параметрами. Этими параметрами, кстати, можно сделать и шаг назад, несмотря на название функции. Если эту функцию вызывать в цикле, то робот будет шагать вперед.
Теперь получение команд и их интерпретация. Добавим в программу состояние:
enum State
{
STOP,
FORWARD,
BACKWARD,
FORWARD_RIGHT,
FORWARD_LEFT
};
И в главном цикле исполнения loop() будем смотреть на текущее состояние (переменная state) и дергать stepForward(), если движемся вперед (с поворотом или без), и опять же stepForward(), но с отрицательным аргументом xamp, если надо двигаться назад. Повороты при этом будут обрабатываться в legWrite(), и для поворота направо ноги с правой стороны будут стоять на месте (пока левые гребут). Вот такой вот конь-танк. Брутально, зато очень просто и работает. Плавный поворот можно сделать только с 3DOF-ногами, пример этого можно увидеть в репозитории buggybug.
switch (state)
{
case FORWARD:
case FORWARD_RIGHT:
case FORWARD_LEFT:
stepForward(h, dh, xamp,
xshift); break;
case BACKWARD:
stepForward(h, dh, - xamp,
xshift); break;
}
В остальных случаях — стоим. Далее здесь же, в loop(), будем вычитывать из последовательного порта команды и изменять state по ним:
char command;
while (Serial1.available())
command = Serial1.read();
switch (command)
{
case 'w':
state = FORWARD; break;
case 's':
state = BACKWARD; break;
case 'd':
state = FORWARD_RIGHT; break;
case 'a':
state = FORWARD_LEFT; break;
default:
state = STOP;
}
На этом основные моменты прошивки закончились, остальное — всякая мелочевка. Хотя есть еще один, пожалуй, важный момент — возможность точной подстройки сервов. Даже при самой аккуратной сборке, если всем сервам подать команду повернуться на 90°, все равно некоторые из них получатся чуть со сбитым углом. Потому нужна возможность его подстраивать. Как у меня это сделано, можно посмотреть в методах hipsWrite() и shinsWrite() и собственно в массивах тонких настроек hipsTune[] и shinsTune[].
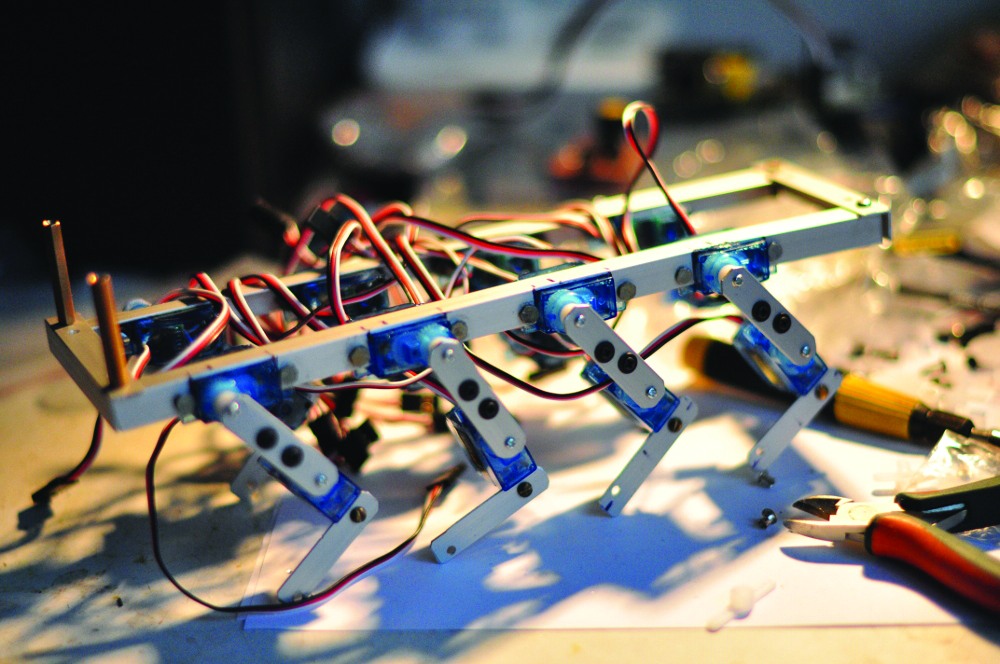
Сборка
Для подобных конструкций не нужно ничего особенного: подойдет листок оргстекла подходящей толщины (с ближайшей хозяйственной барахолки) и лобзик либо ножовка, чтобы выпиливать детальки. И конечно, дрель, чтобы сверлить отверстия. Вместо оргстекла можно использовать фанеру (тогда на финальной конструкции можно еще сделать памятную надпись выжигателем). Можно использовать и листы или уголки алюминия. Со Слейпниром я пошел как раз по пути использования алюминиевого уголка с ребрами в 1 см (купил где-то в строительном супермаркете).
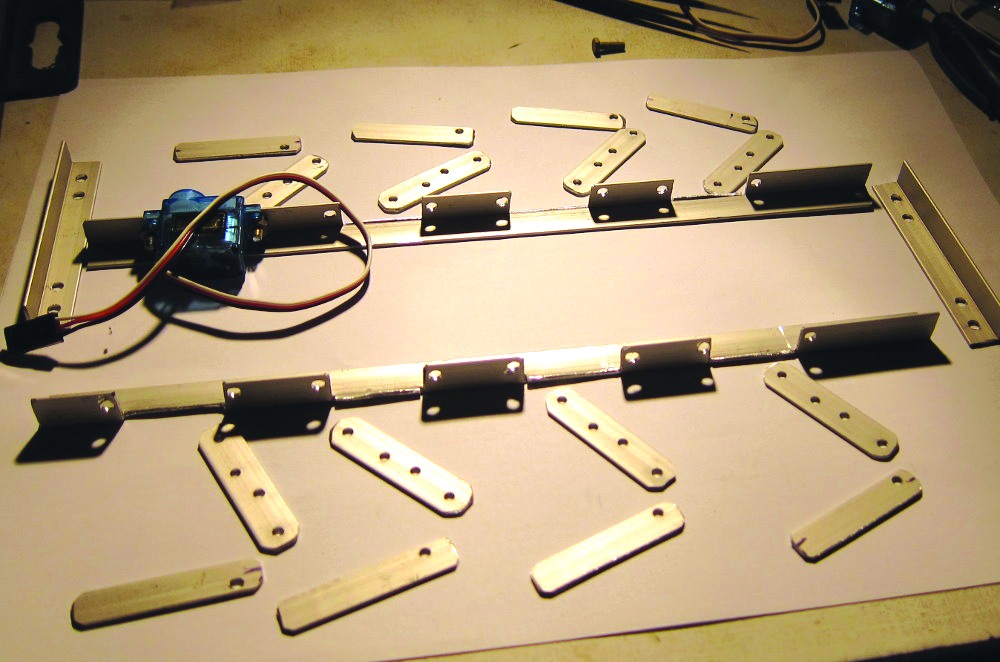
Основой будет прямоугольная рама. Конечности — 4-сантиметровые полосочки. Стоит также запастись множеством маленьких болтиков, гаечек. Режем уголок на нужные кусочки, вырезаем пазы для сервов, сверлим дырочки для крепежных болтов и шурупов. Конструкцию лучше раз показать, чем описывать. Размеры могут быть любые, роботы должны быть разнообразны. Но помни: чем длиннее ноги, тем больший рычаг придется толкать сервоприводу и тем больше будет на него нагрузка. Вплоть до невозможности провернуться и даже поломки. Но 4–5 см — без проблем.
Для бюджетных легких роботов часто не заморачиваются на отдельное шарнирное соединение конечностей, и вся нагрузка ложится целиком на вал сервопривода. При маленьком весе это совсем не критично. А при большем весе стоит подумать о сервах с металлическими шестеренками и шариковым подшипником вала.
В комплекте с каждым сервом, как правило, поставляется пара-тройка шурупов и набор насадок, которые можно закрепить шурупом на валу для различных применений. Нам больше всего подойдет одиночный «рог» (или horn), который позволяет прикрепить к серву планку. Так, к одной планке крепятся оси двух сервов, и планка становится «бедром». При этом один серв крепится на теле, а другой становится частью голени. К нему стоит прикрутить еще планку, просто чтобы удлинить или сделать конечность поинтересней. Немного кропотливой работы — и платформа готова (удобные наборы отверток, ключей, пинцеты, кусачки и прочее сильно ускоряют дело).
WWW
- Код нашего Слейпнира: bit.ly/Kq4POX
- Код еще одного моего робота, гексапода buggybug. В этом же репозитории можно найти код для управления роботом со смартфона: bit.ly/1dEmpta
Что дальше?
Весь проект доступен на странице https://github.com/poconoco/sleipnir. Я описал одну из самых непрактичных конфигураций — много 2DOF-ног, высокий, узкий, легко валится на бок. Попробуй сделать лучше, робота с 3DOF-ногами. С 4DOF-ногами. С клешнями или челюстями. В качестве примера 3DOF инверсной кинематики можешь обращаться к репозиторию buggybug — там прошивка гексапода. Также можно делать не управляемых, а интеллектуальных роботов, ставя вместо Bluetooth датчики расстояния, научить робота обходить стены и препятствия. Если такой сенсор поставить на сервопривод и вращать им, то можно сканировать местность, практически сонаром.